

امروزه یکی از پر تواتر ترین کلمات در دنیای تکنولوژی بخصوص تکنولوژی های صنعت خودرو به یقین خودروهای خودران است. خودروهایی که حالا آنقدر هوشمند و با شعور شده اند که به راحتی یا بجای شما تصمیم می گیرند یا شما را مجاب می کنند تصمیم درست را بگیرید. این فناوری به یقین صرفاً در پرده حضور مکانیزم های هوشمند یا سنسور های مختلف امکان پذیر است. همان ها که امروزه آن ها را با عنوان رادارهای خودرو می شناسیم.
به گزارش پایگاه خبری جوان خودرو:

بر خلاف تصور مصرف کنندگان امروزی خودرو، آغاز راه خودروهای بدون نیاز به راننده نه تنها به ایلان ماسک و شرکت تسلا مربوط نمی شود بلکه قدمتی تقریباً یکصد ساله دارد. اولین بار در آغاز دهه 1920 بود که مهندسین مختلف به فکر تولید خودرویی افتادند که نیاز به حضور راننده داخل آن نباشد. البته هدف نهایی آنها در آن دوره رسیدن به این تکنولوژی بود که کلیه خودروها از طریق برج های مراقبت مختلف در سطح شهر و توسط اپراتورهای حرفه ای هدایت شوند. این کار باعث می شد افراد دیگر زحمت رانندگی آنهم در خیابان های پر ترافیک شهری مثل نیویورک را به خود ندهند. همچنین با توجه به هدایت از یک مرکز کنترل قانونمند و حرفه ای، میزان بی قانونی و ایجاد حادثه و ترافیک به دلیل عدم مهارت، به حداقل خود می رسید.
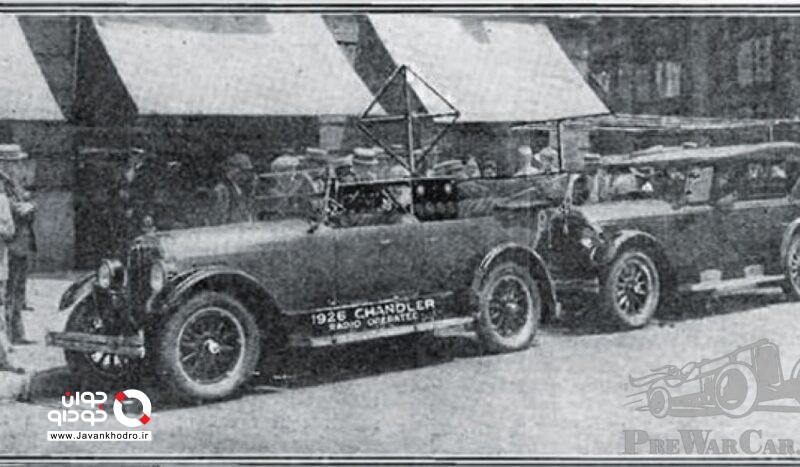
البته پر واضح است که آن هدف بلند پروازانه هیچ گاه محقق نشد و حتی به آن نزدیک هم نشدند. اما جالبست بدانید در طی همین مسیر بود که اولین خودروی بدون نیاز به راننده تولید شد و از بالای خیابان برادوِی به سمت پایین خیابان پنجم آنهم در اوج ترافیک نیویورک حرکت کرد. البته این خودرو درواقع به یک سیستم رادیو کنترل مجهز شده بود و از طریق یک کاربر که در خودرویی دیگر با فاصله از آن حرکت می کرد کنترل می شد. این پروژه که در سال 1926 توسط فردی به نام هودینی روی خودروی چندلر اتفاق افتاد درواقع اولین مواجهه جهان با خودرویی بود که راننده نداشت. (درتصویر بالا خودروی هدایت گر و خودروی کنترل شونده که دارای یک آنتن بزرگ است را می بینید)
اما همانطور که متوجه شدید این خودرو با آنچه ما امروزه به عنوان خودروی خودران می شناسیم فرسنگها فاصله دارد. این فاصله عمیق در صنعت خودروی جهان با تکنولوژی ای پر شد تحت عنوان سنسورها و هوش مصنوعی. به طور خلاصه باید اینگونه شرح دهم که برای خودرو باید یک راننده با عملکردی شبیه به انسان طراحی می شد. به این جهت که این خودرو مانند هواپیماها هم بتواند به صورت خودکار هدایت شود و هم درصورت لزوم و نیاز امکان هدایت دستی آن توسط راننده وجود داشته باشد.
عملکرد انسان به این گونه است که از تعداد قابل توجهی حسگر، اعم از حسگرهای بینایی، شنوایی، لامسه، بویایی و غیره حجم قابل توجهی از اطلاعات را دریافت می کند. سپس در ساختاری بسیار پیچیده این اطلاعات را ترجمه کرده و در نهایت تحلیل می کند و بر اساس تحلیل نهایی تصمیم گرفته و تصمیم را ابلاغ و اجرا می کند. پس اولین قدم در این مسیر دریافت اطلاعات دقیق و جامع از خودرو و شرایط محیطی و محاطی آن بود. این کار که به نوعی اولین قدم ها در مسیر تولید خودروهای خودران امروزی بود توسط اختراع گیرنده هایی که امروزه آنها را به نام رادارهای خودرو می شناسیم کلید خورد.
برخی از تبلیغات، بنز یا شورولت را مبدع خودروی خودران می دانند. ولی درواقع مسیر تولید خودروهای خودران یا بهتر بگویم خودروهای هوشمند، مسیری بسیار پر فراز و نشیب و همواره پیشروتر و فراتر از زمان خود بوده است. به همین دلیل واقعاً نمی توان یک برند یا یک فرد را به عنوان پایه گذار یا مبدع رادارها در خودرو دانست. چراکه بسیاری از این رادارهای خودرو به موازات هم در شرکت های مختلف یا توسط افراد مختلف با روش ها و تکنولوژی های متفاوت ابداع و به جهان معرفی شده اند.

اولین خودرویی که به عنوان یک خودروی واقعاً خودران در جهان معرفی شد، یک ون مرسدس بنز در دهه 1980 میلادی بود. علت آنکه یک ون برای این کار انتخاب شده بود حجم بسیار بالای سیستم های الکترونیک و رادارهای بزرگی بود که لازم بود در این ون قرار بگیرند. البته با وجود اینکه این کار در کمپانی مرسدس بنز و روی یکی از محصولات این کارخانه انجام شد ولی درواقع یک پروژه چند ملیتی بود که بسیاری از صاحبان تکنولوژی از سراسر دنیا اعم از ژاپن و آمریکا روی آن کار کرده بودند. به همین دلیل امتیاز ون خودران مرسدس بنز را اصلاً نمی توان به تنهایی به آلمان داد و این یک پروژه بزرگ جهانی بود.
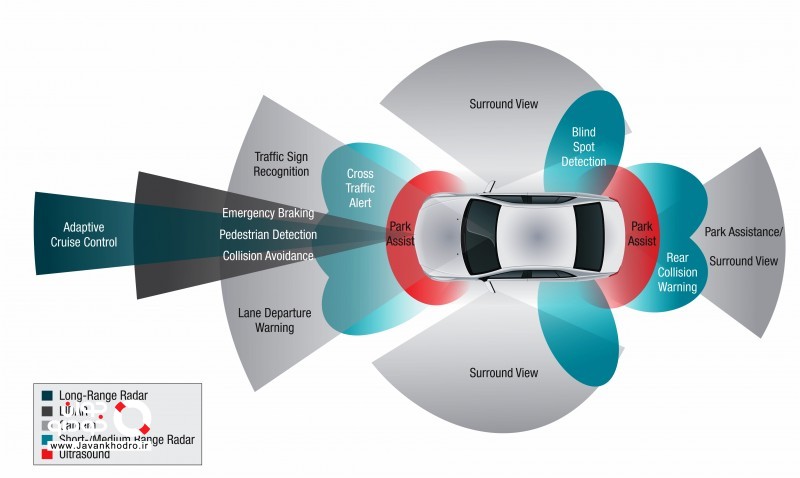
اما امروزه این رادارها به قدری کوچک، کم مصرف، هوشمند و اقتصادی شده اند که به راحتی روی خودروهای ارزان قیمت بازار هم برخی از آنها یافت می شوند. حال بد نیست با عملکرد برخی از این رادارها به طور خلاصه آشنا شویم.

اولین راداری که روی یک خودرو قرار گرفت رادار رانندگی بین خطوط بود که در دهه 1950 میلادی روی یک خودروی پروتوتایپ به نام پونتیاک فایربرد نمره II (نمره2) قرار گرفت. البته عملکرد آن با رادارهای امروزی رانندگی بین خطوط تفاوت بنیادینی دارد. پونتیاک نمره 2 اطلاعات را از طریق نوارهای فلزی که روی زمین کار گذاشته شده بود دریافت می کرد.
در خودروهای امروزی با قرارگرفتن یک دوربین هوشمند در قسمت پیشانی جلو یا احیاناً در بخشی از جلوپنجره، تصویری از جاده دریافت می شود. در این تصویر با استفاده از حسگرهای هوش مصنوعی محل قرار گرفتن خطوط روی جاده و شکل و رنگ آنها شناسایی می شوند. اطلاعات توسط یک کامپیوتر در خودرو که معمولاً مجزا از ECU اصلی خودرو است تجزیه و تحلیل شده سپس خودرو متوجه می شود که در چه مسیری قراردارد و چگونه باید عمل کند.

ازجمله مشکلاتی که راننده ها همواره با آنها روبرو بودند ندیدن تابلوهای راهنمایی و رانندگی یا فراموشی منظور آنها بوده است. یکی دیگر از رادارهای بسیار پرکاربرد در خودروها، رادار تابلو خوان است. رادارهای تابلوخوان با اسکن کردن اطراف مسیر که محل قرارگیری تابلوها است، تابلوهایی که در استاندارد جهانی راهنمایی و رانندگی تعریف شده اند را شناسایی کرده در صفحه نمایش داخل کلاستر یا سیستم مولتی مدیا نمایش می دهند. در نمونه های پیشرفته تر حتی یک شرح مختصر از معنای تابلو هم در کنار یا زیر آن به نمایش در می آید. مثلاً محل «عبور حیوانات وحشی» یا «خطر ریزش کوه».
سومین مشکلی که در روند خودران سازی خودروها وجود داشت، دریافت اطلاعات خودروهای اطراف بود. در ابتدای راه دانشمندان سعی داشتند با بهره برده از تکنولوژی GPS بر این مشکل فائق آیند. اما دو اشکال اساسی وجود داشت. اول اینکه سرعت دریافت داده از طریق GPSبسیار کند بود و ممکن بود برای تصمیم گیری دیر شود. دوم اینکه در بسیاری از نقاط دنیا به دلایل مختلف GPS در اختیار همگان نبود.
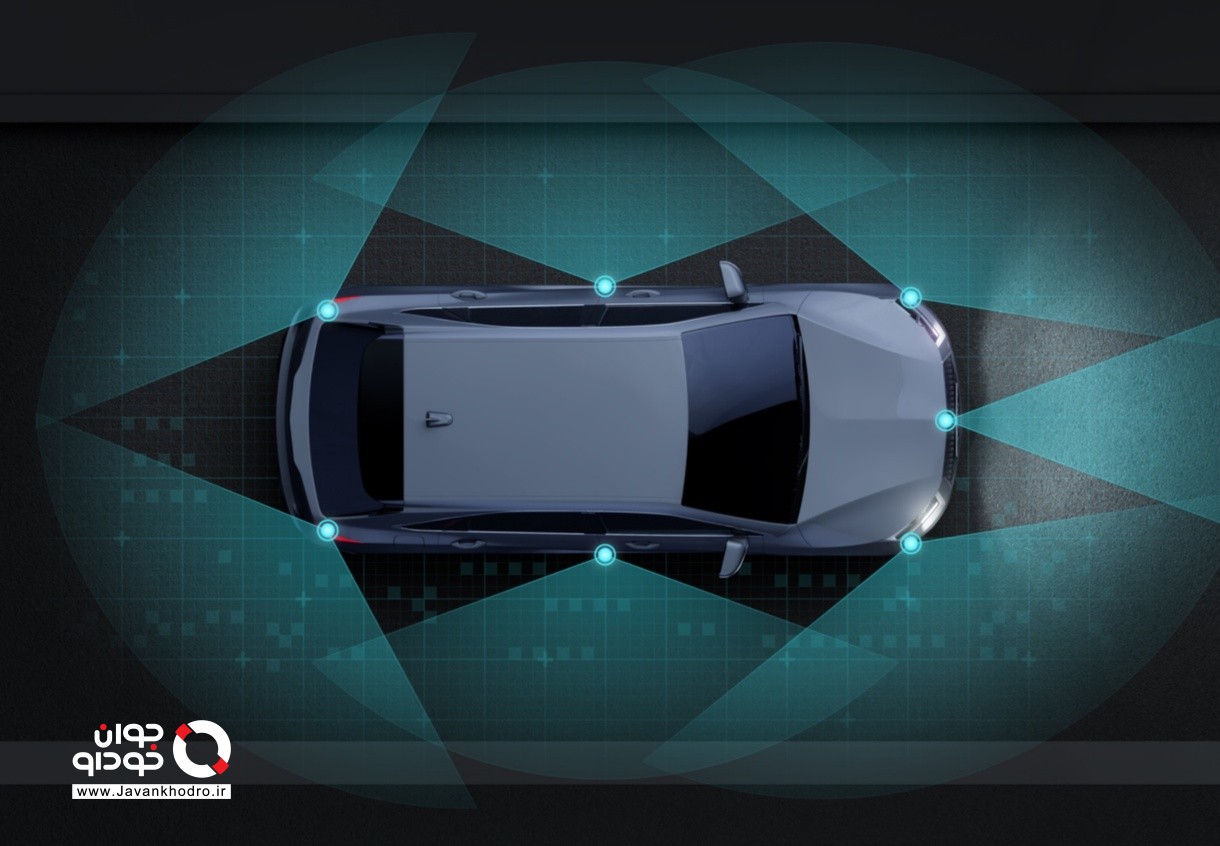
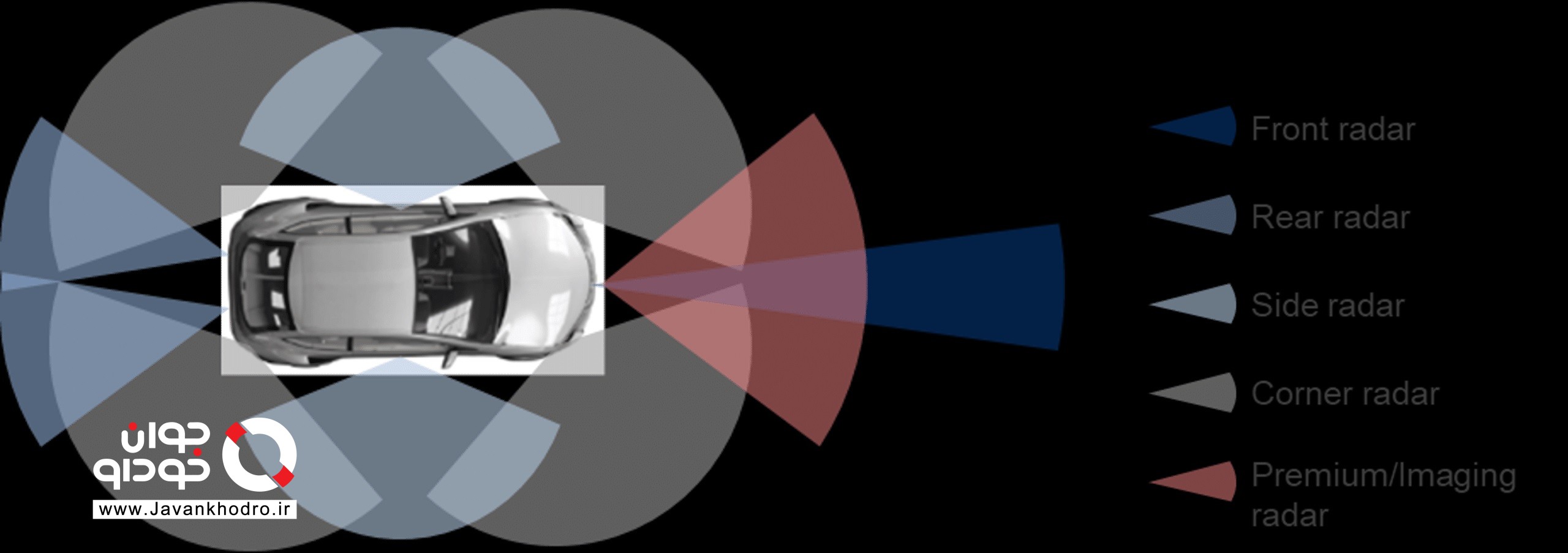
لذا برای حل این مشکل از مجموعه ای از سامانه ها استفاده شد که ماحصل اطلاعات دریافتی از همه آنها چیزی شد که امروزه به رادارهای نقطه کور، دید در شب و غیره معروف اهستند. در این رادارها از اسکن صوتی و تصویری محیط، اطلاعات GPS و در نمونه های مفهومی و آینده نگرانه از اطلاعات خودروهای دیگر بهره گرفته می شود تا خودرو تشخیص دهد در اطرافش چه می گذرد.
در ساده ترین نمونه رادار نقطه کور، هنگام نزدیک شدن یک خودرو از کنار یا هنگام تصمیم راننده جهت تغییر مسیر در صورت وجود خودروی کناری هشدار تصویری به شکل آلارم هایی روی آینه کناری یا در کلاستر خودرو روشن می شود. در نمونه های پیشرفته تر که در خودروهایی مانند مرسدس بنز EQS یا تسلا یافت می شود، در سامانه مولتی مدیای مرکزی تصویری کامل از خودروهای اطلاف به راننده ارائه می شود.

شاید به جرأت بتوان گفت یکی از مهم ترین رادارها برای جاده های برون شهری، رادار پیشگیری از خواب یا مستی راننده است. صد افسوس که این سامانه هنوز چندان به خودروهای اقتصادی راه نیافته است. این سامانه به این صورت عمل می کند که یک دوربین حسگرِ تصویری، حرکات چشم راننده را مدام کنترل و اسکن می کند. در صورتی که متوجه بشود حرکات پلک و مردمک چشم طبیعی نیست با لرزاندن فرمان، پخش کردن صدا یا رایحه های خاص سعی در هوشیار کردن راننده دارد. در رادارهای پیشرفته تر و هایتک تر حتی اگر متوجه شود که در هوشیار کردن راننده موفق نیست به سرعت هدایت کامل خودرو را در دست گرفته و آن را در کنار جاده متوقف می کند.
بیشتر ما تصور می کردیم اولین راداری که وارد خودروها شده است رادار پیشگیری از تصادف باشد. چیزی که امروزه تقریباً در تمامی خودروها، سطوح مختلفی از آن موجود است. اما چیزی که ما امروزه آن را سنسور پارک یا سنسور پیشگیری از تصادف می نامیم و در واقع ابتدایی ترین شکل رادار پیشگیری از تصادف است، سالها پس از رادارهای دیگر وارد خودروها شد. برای مثال مرسد بنز W140 یا همان اتاق تانک معروف هم بجای سنسور پارک از دو آنتن کوچک روی گلگیرهای عقب بهره می برد.
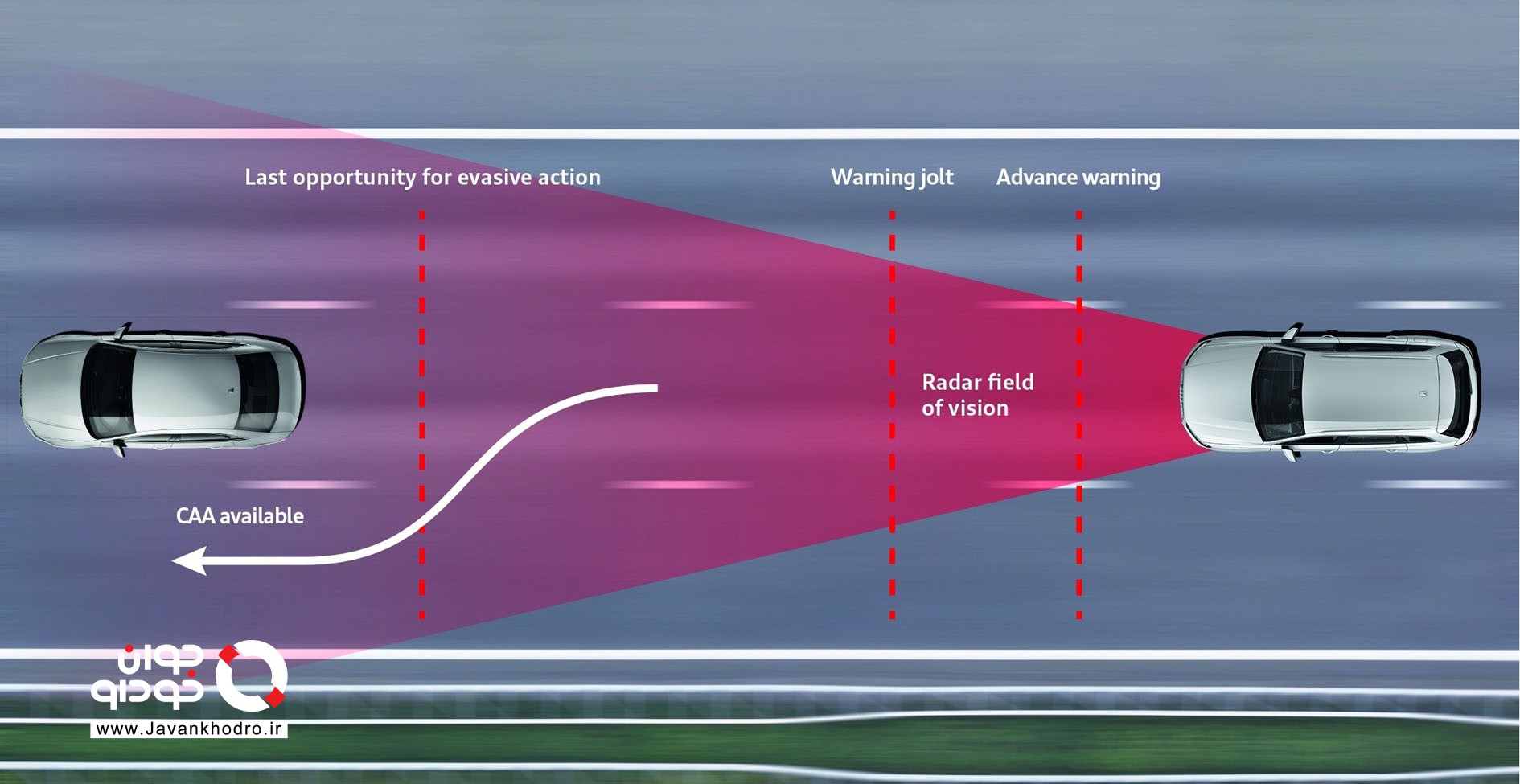
رادار پیشگیری از تصادف در حال حاضر اطلاعات خود را از مجموعه ای از سنسورها دریافت می کند. حسگرهای پارک، اسکنرهای وضعیت مسیر در اطراف خودرو، GPS و دیگر حسگرها مجموعه ای از اطلاعات را برای سامانه رادار پیشگیری از تصادف تأمین می کنند. در پیشرفته ترین نوع این سیستم که توسط کمپانی ولوو توسعه یافته است سامانه ترمز خودکار نیز به آن اضافه شد. سامانه ترمز خودکار با دریافت اطلاعات از رادار پیشگیری از تصادف هنگامی که تشخیص می دهد زمان طلایی در اقدام به ترمز گیری درحال از دست رفتن است به سرعت وارد مدار شده و اقدام به گرفتن یک ترمز بهینه می کند.
سامانه کروز کنترل یا همان سامانه حفظ سرعت خودرو نیز یکی از سامانه های بسیار قدیمی در خودروهای لوکس است. این سامانه از سالهای بسیار دور در خودرهای لوکس آمریکایی و حتی برخی خودروهای اقتصادی گروه پژو سیتروئن دیده می شد. البته در آن زمان تقریباً هیچ رفتار هوشمندانه ای از کروز کنترل دیده نمی شد. صرفاً با ارتباط گرفتن با جعبه دنده و دریچه گاز و البته سالهای بعد با ECU اقدام به حفظ سرعت مورد نظر راننده می کرد.
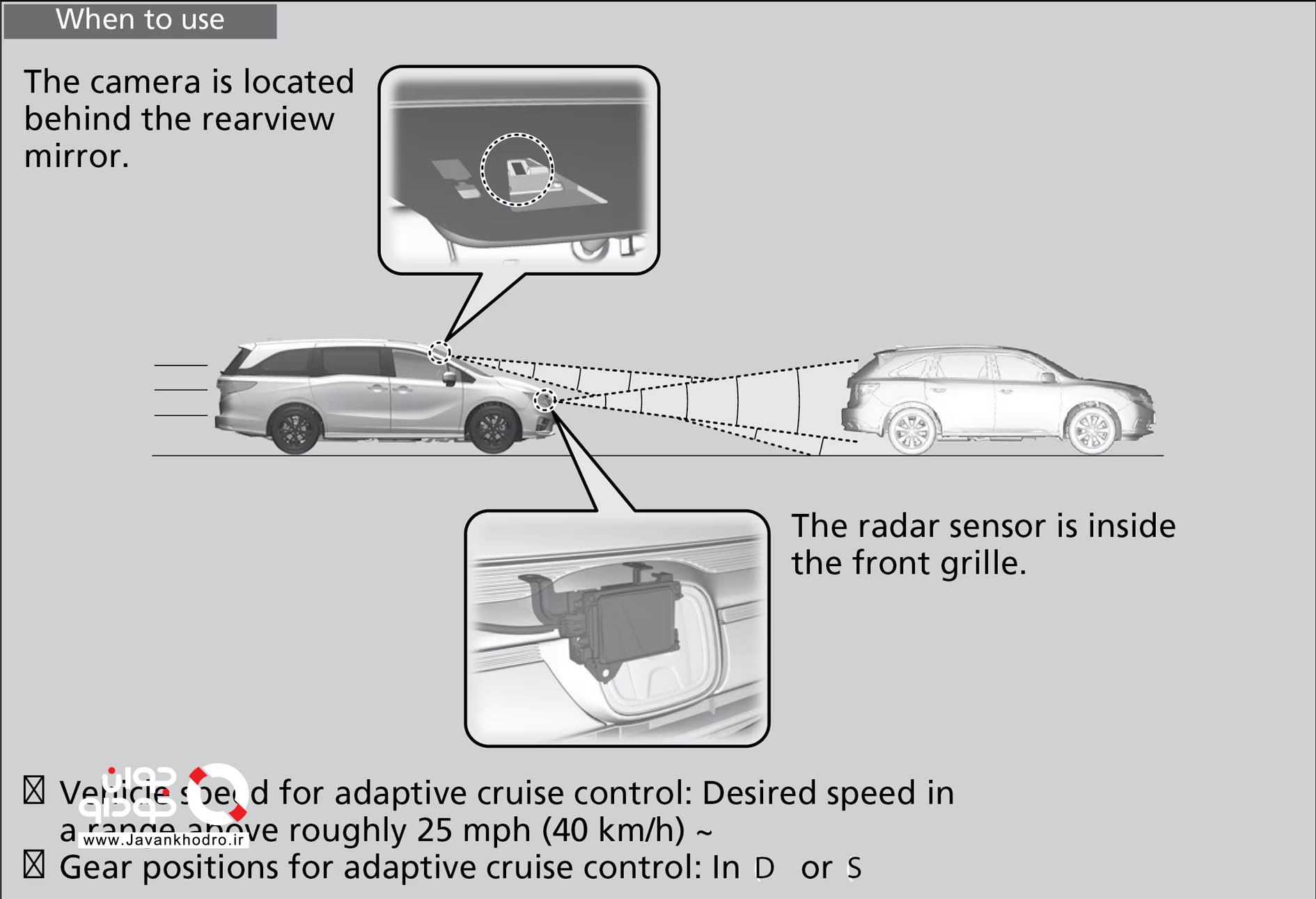
اما رادار کروز کنترل که امروزه آن را با نام کروز کنترل تطبیق پذیر (Adaptive) می شناسیم رفتاری بسیار هوشمندانه دارد. کروز کنترل آداپتیو از طریق اسکنری که خودروی جلویی (و گاهی حتی عقبی) را اسکن می کند، سرعت آنها را شناسایی کرده و با توجه به سرعت مورد درخواست راننده، رفتار خودرو را تنظیم می کند. برای مثال شما در ترافیک اتوبان همت در حال حرکت هستید و کروز کنترل تطبیق پذیر خودروی خود را روی سرعت 80 کیلومتر بر ساعت تنظیم کرده اید. در این صورت تا زمانی که خودرو ها درحال تردد با سرعت پایین هستند خودروی شما نیز با همان سرعت حرکت می کند و به محض سرعت گرفتن خودروی جلویی خودروی شما نیز اقدام به افزایش سرعت تا حداکثر 80 کیلومتر بر ساعت می کند. جالبتر آنکه در نمونه های پیشرفته تر می توانید میزان فاصله خود با خودروی جلویی یا عقبی را نیز برای رادار کروز کنترل تطبیق پذیر تعریف کنید.

از جمله دیگر آپشن های ایمنی که بعضاً آن را یکی از رادارهای خودرو می دانند سیستم نوربالای تطبیق پذیر است. همانطور که احتمالاً می دانید نور اصلی خودرو یا دراقع نور رانندگی همان چیزی است که ما به نام نوربالا یا سو بالا می شناسیم و معمولاً خیلی به ندرت از آن استتفاده می کنیم. نحوه استفاده هم به این گونه است که تا زمانی که با خودروی جلویی فاصله ای کمتر از 150 متر داریم و خودرویی از لین روبرو نمی آید، باید از نوربالا استفاده کنیم.
اما تعویض دائم از نور پایین به نور بالا بخصوص در معابر شهری آنقدر آذار دهنده است که اکثر رانندگان شهرهای شلوغ به طور کل از خیر استفاده از نور اصلی خودرو یا همان نوربالا می گذرند. در تکنولوژی جدید، خودرو به وسیله حسگرهای دقیقی که در بخش جلوی خودرو قراردارد با دقت بالا حضور خودروی دیگر با فاصله کم از جلوی خودرو یا عبور خودرویی دیگر از لین مقابل را تشخیص داده در نمونه های ساده اقدام به تغییر نور به حالت نور پایین می کنند. در نمونه های پیشرفته تر که چراغ ها از تکنولوژی کاملاً ال ای دی بهره می برند، اقدام به تنظیم دقیق نور و تاریک کردن نقاطی که ممکن است مزاحم دیگران شود می کنند.

از جمله دیگر سیستم های موجود در خودروهای لوکس تر و گران قیمت تر امروزی مکانیسمی است که سلامت راننده را به طور پیوسته کنترل می کند. بد نیست بدانید خودرویی مانند مرسدس بنز W222 در آن واحد حدود 70 فاکتور حیاتی از راننده را بررسی می کند. یعنی حتی بیشتر از برخی تخت های CCU یا ICU. این بررسی دقیق به دلیل آنست که درصورت بروز خواب آلودگی یا از دست رفتن هوشیاری، خودرو بتواند سریعاً از بروز حوادث احتمالی پیشگیری کند. البته اینکه به سرعت با اورژانس و پلیس هم تماس می گیرد و مکان دقیق خود به همراه علائم حیاتی راننده را اعلام می کند شاید چندان عجیب و پیچیده نباشد.
البته همانطور که پیشتر هم ذکر شد تمام این رادارها و حسگرها با این هدف توسعه یافتند که به رانندگی خودکار و خودروهای خودران تبدیل شوند. درواقع آنچه امروزه به سیستم های خودران سطح یک تا سه مشهور است از این جا به بعد ماجراست. یعنی اینکه سیستم کامپیوتر مرکزی خودرو از این دیتاهای دریافتی چگونه بهره برده و اقدام می کند. هرچه این کامپیوتر هوشمندتر بوده و دقیق تر بتواند دیتاها را تحلیل کرده و نسبت به آنها تصمیم گرفته و اقدام کند، خودرو به سطح خودران بالاتری رسیده است.
برای مثال در سطح خودران یک، خودرو درصورت تشخیص خطر یا خطای راننده، شروع به دادن هشدارهای مختلف می کند. در سطح خودران دو، خودرو در برخی موارد حتی استفاده از پدال ترمز، گاز و حتی فرمان را به دست می گیرد. در سطح خودران سه، خودرو درواقع به راننده به عنوان یک ناظر دائمی بر اعمال خود نیاز دارد. یعنی درواقع درسطح خودران سه به گونه ای جای خودروی هوشمند و راننده تغییر کرده و حالا این خودرو است که رانندگی می کند و راننده است که بر عملکرد او نظارت دارد.
همواره در روند پیشرفت تکنولوژی این حس که یک ماشین یا یک هوش مصنوعی جای انسان را بگیرد یا نیاز به حضور انسان را از بین ببرد برای بشریت ترسناک بوده است. حال آنکه درواقع رسالت و هدف تکنولوژی همین است که نه تنها کارها را دقیق تر و کامل تر انجام دهد بلکه تا حد امکان بدون نیاز به اپراتور متخصص کار را پیش ببرد. به همین دلیل شاید امروزه هنوز سوارشدن بر یک خودروی کاملاً خودران برای نسل پدران و مادران ما کمی ترسناک و نامعقول به نظر برسد. اما یادتان باشد همین سی سال پیش، دیدن لوکیشن دقیق افراد و تماس تصویری با آنها یا ویژه شیاطین بود یا موجودات فرازمینی.












دیدگاه خود را بنویسید